真正的在线功能,无需为零件做准备工作
使用外差干涉法使激光雷达能够测量几乎任何表面,而无需为零件做准备工作或者使用靶球和特征适配器。
APDIS MV430E提供迄今为止所有激光雷达中最快的特征测量速度,可以在生产线节拍时间内检测关键特征,或采用抽样策略覆盖一组车身的更多特征,以实现真正的过程控制
了解APDIS增强型MV430E系统如何成为有史以来最快的激光雷达
了解APDIS激光雷达如何为汽车质量控制带来变革
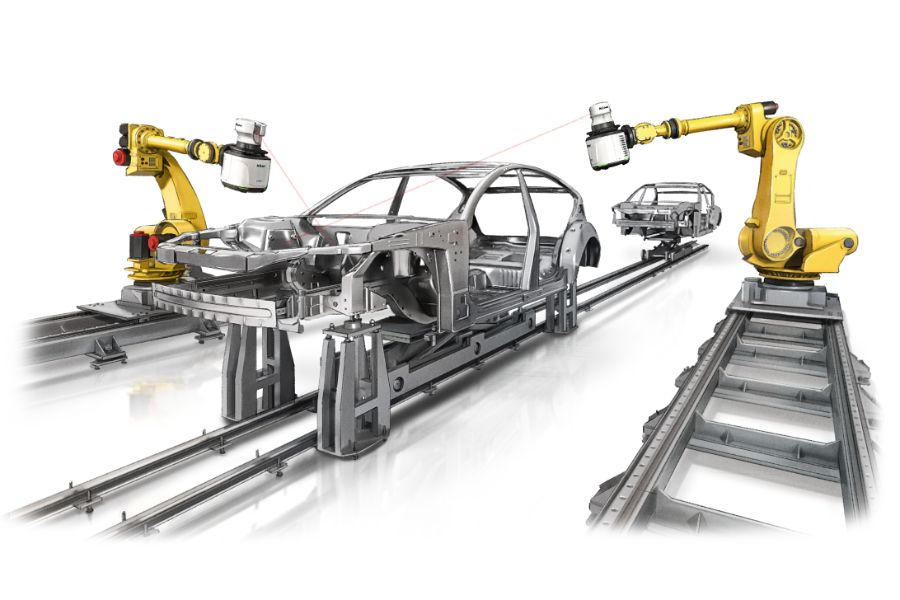
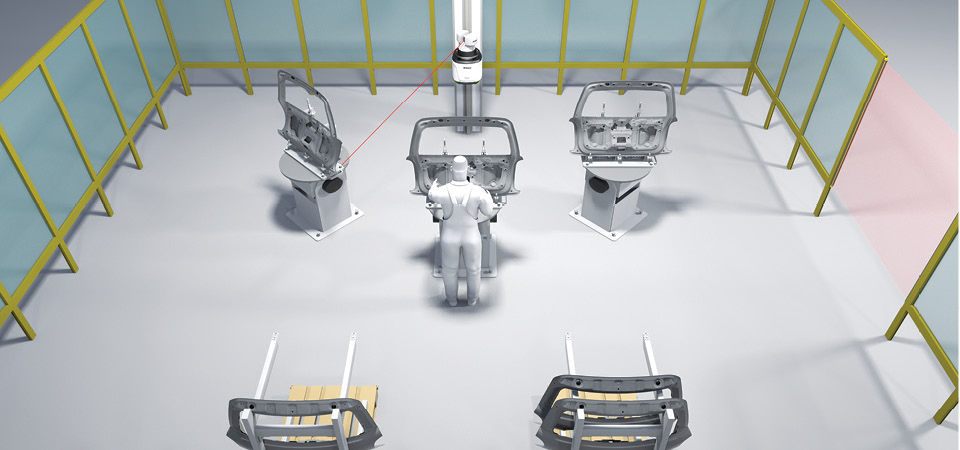
在全自动机器人测量解决方案中使用APDIS系统,引入了一种创新的白车身(BIW)检测方法。

机器人定位激光雷达,对所需特征提供实时图像;然后,激光雷达通过测量夹具上的定位工具球自动重新对准零件。

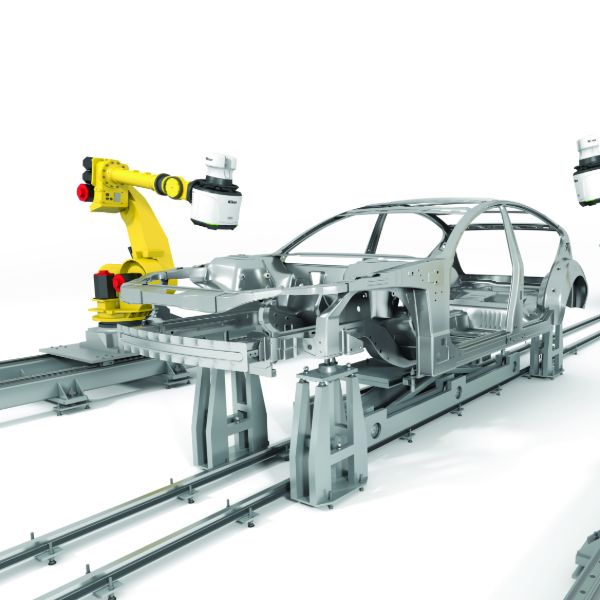
APDIS激光雷达解决方案的测量速度是传统CMM的6倍以上,可大大提高测量效率。

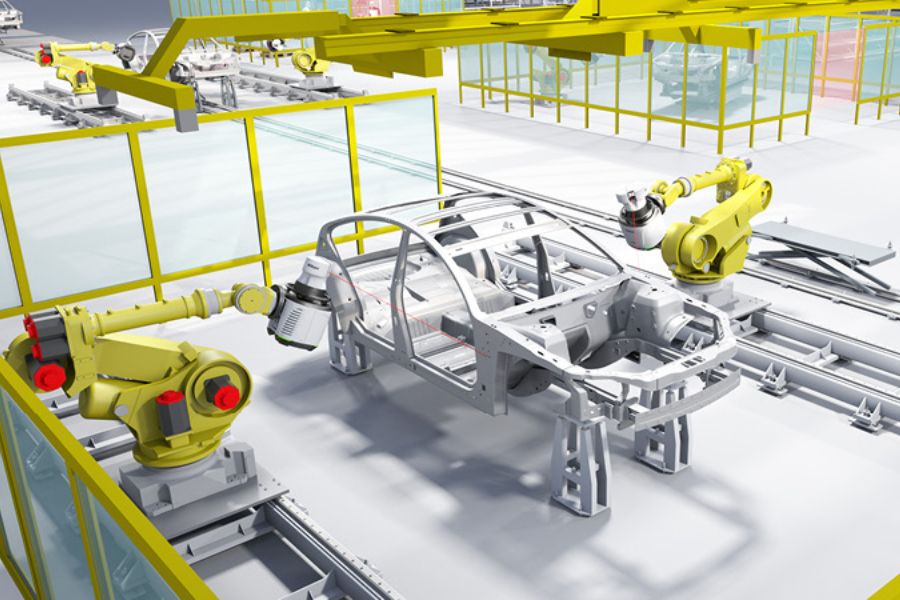
随着白车身检测朝着质量4.0的方向发展,它将成为集成到生产线中的全自动、非接触、绝对测量的流程。传统的检测方法,如水平臂CMM,正在被更新的自动化方法(如激光雷达系统)所取代。
在计量室使用APDIS替代传统CMM,由于更快的测量使问题调查更迅速,离线设施不再是瓶颈。APDIS可用于从部件检测到整个底盘和白车身的一系列零件尺寸,具体取决于配置,具有许多优点。
APDIS 汽车行业

APDIS 激光雷达综合
| MV430E | |
| 测量距离 | 0.5m~30 m |
| 数据采集频率 | 4,000 Hz |
| 扫描速度* | 1000 点/秒 2 秒/平方厘米 |
| 特征扫描模式 | 增强特征扫描** |
| 振动测量 | 最大2000Hz; 1µm/m 灵敏度 |
| 防尘防水等级 | IP54 |
*默认设置 – 堆栈 4, 点间距 0.1mm, 线间距 1mm.
**特征扫描速度比标准型号快一倍,具体速度取决于设置.
| 距离 | 水平角 | 俯仰角 | |
| 测量范围 | 0.5m - 30m / 50m | ± 180° | ± 45° |
| 精度 (MPE) | 20µm + 5µm/m | 13.6µm/m | |
| 点到点的空间精度* MPE(µm) = √(2(20 + 5RAve)2 + (13.6RAve)2) | |||||||
| 平均距离(m) | 0.5 | 1 | 2 | 5 | 10 | 20 | 30 |
| 最大允许误差(MPE) (µm) | 33 | 40 | 57 | 115 | 216 | 420 | 625 |
| 典型精度 (µm) | 17 | 20 | 28 | 58 | 108 | 210 | 313 |
* 根据ASME B89.4.19 – 2006的规定,精度是环境温度20℃,设备正立时的最大允许误差。典型精度是MPE的一半。所有的测量都是在稳定的环境下进行的,使用½英寸25级或更好的工具球

